KyoHA、2026年3月に初期プロトタイプ製作へ
ベストカレンダー編集部
2025年10月2日 16:39
初期プロトタイプ製作予定
開催日:3月1日
📅 カレンダーに追加:Google|iPhone/Outlook
なぜ今、国産ヒューマノイドか — 設立の背景と社会課題
2025年10月2日12時03分、一般社団法人「KyoHA(京都ヒューマノイドアソシエーション)」の進捗発表が公開されました。本リリースは早稲田大学、株式会社テムザック、株式会社村田製作所、SREホールディングス株式会社らが中心となって設立した新団体の活動報告であり、日本発の純国産ヒューマノイドロボット開発に向けたモノづくり体制と製作ロボットの内容、今後のスケジュールを詳細に伝えています。
近年、米国や中国を中心にヒューマノイド技術の開発が急速に進展する一方で、日本国内ではハードウェア領域の国産開発体制や産業を横断した統合的取り組みが十分に整備されていないとの認識があります。自然災害や深刻化する労働力不足といった社会課題に対し、極限環境での活動が期待されるヒューマノイドは重要な技術領域です。KyoHAは京都を拠点に、国内の技術を結集する産業連携の枠組みとして2025年8月に一般社団法人として設立されました。
本発表では、設立の背景に加え、参画組織の拡充、新規参画企業・研究機関、初期プロトタイプと2系統の2ndモデル(パワー重視モデルと俊敏性/機能性重視モデル)の開発方針、具体的なスケジュールが明示されています。以下では発表内容をすべて網羅し、読者が理解しやすい形で整理して解説します。
KyoHAの組織体制と参加メンバーの役割
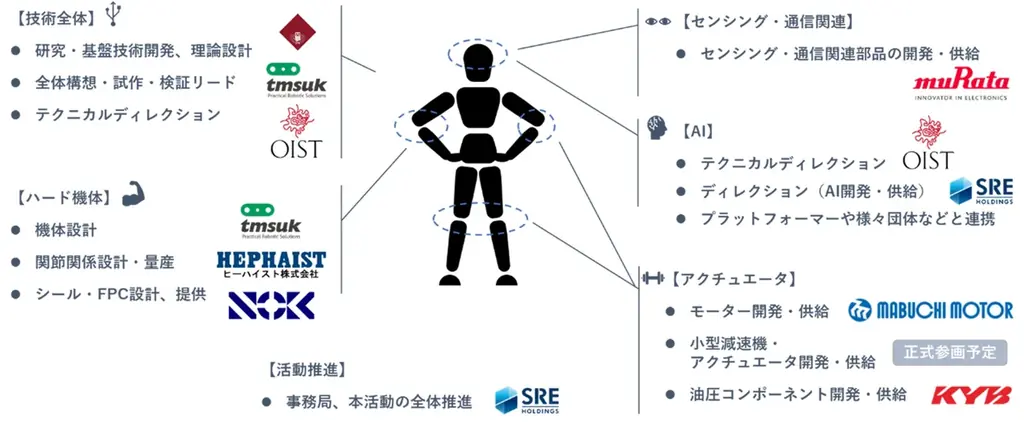
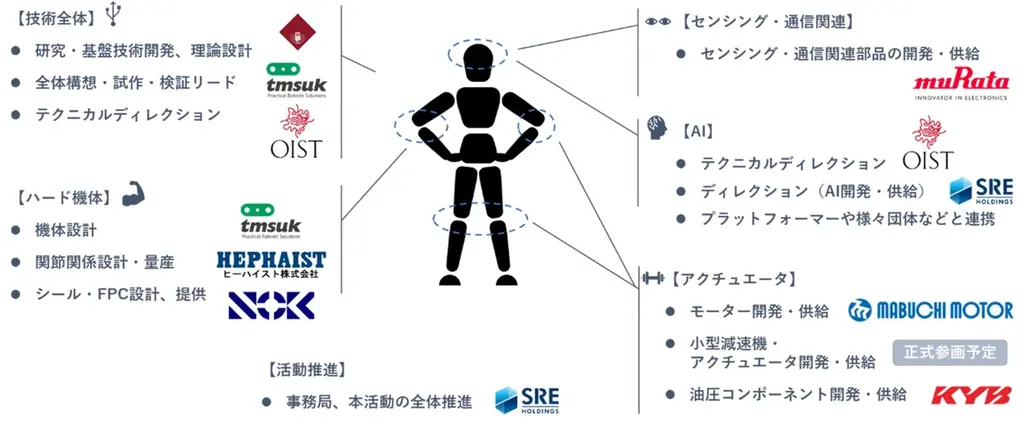
KyoHAには学術機関と産業界の双方から複数の組織が参画しています。既存参画の早稲田大学、株式会社テムザック、株式会社村田製作所、SREホールディングス株式会社に加え、新たに沖縄科学技術大学院大学(OIST)、マブチモーター株式会社、カヤバ株式会社、NOK株式会社、ヒーハイスト株式会社が参加しました。これにより機構的には機構設計、動力・駆動、シール・精密部品、振動制御、制御ソフトウェア、事業実装の各領域がカバーされます。
参画組織は以下の通りです。本文では、各組織の主要な役割や代表者情報も併記します。
- 早稲田大学(理工学系) — ヒューマノイド研究と学術的指導。理事長:高西 淳夫 教授(早稲田大学ヒューマノイド研究所所長、IEEEフェロー等)。
- 株式会社テムザック — 実用ロボット(WORKROID)開発・現場実装の経験を活かした設計・検証。代表取締役議長 髙本 陽一、代表取締役社長 川久保 勇次。
- 株式会社村田製作所 — 電子デバイス・センサなどの供給と量産戦略。執行役員 川島 誠。
- SREホールディングス株式会社 — AI・DXの実務実装と事業推進支援。担当:佐々木 啓文。
- 沖縄科学技術大学院大学(OIST) — ロボット競技・自律制御の知見提供。教授(アジャンクト)北野 宏明。
- マブチモーター株式会社 — 小型高性能モーターの提供と動力ソリューション。取締役常務執行役員 中村 剛。
- カヤバ株式会社 — 振動制御・パワー制御、油圧系技術。所長 伊藤 隆。
- NOK株式会社 — シール技術・精密部品、R&Dの提供。上席理事 庄島 大八。
- ヒーハイスト株式会社 — 直動機器や精密部品加工、ロボット関節部品の供給。専務取締役 尾崎 文彦。
役割分担は技術分野ごとに明確化されており、学術面での運動制御・協調制御の研究(早稲田・OIST)と産業面での部品供給・量産技術(村田・マブチ・NOK・ヒーハイスト)、実装と事業化の推進(テムザック・SRE)が連携する構成です。
- 設立日
- 2025年8月(一般社団法人として設立完了)
- 発表日
- 2025年10月2日 12時03分
開発するヒューマノイドの設計方針と段階的な開発計画
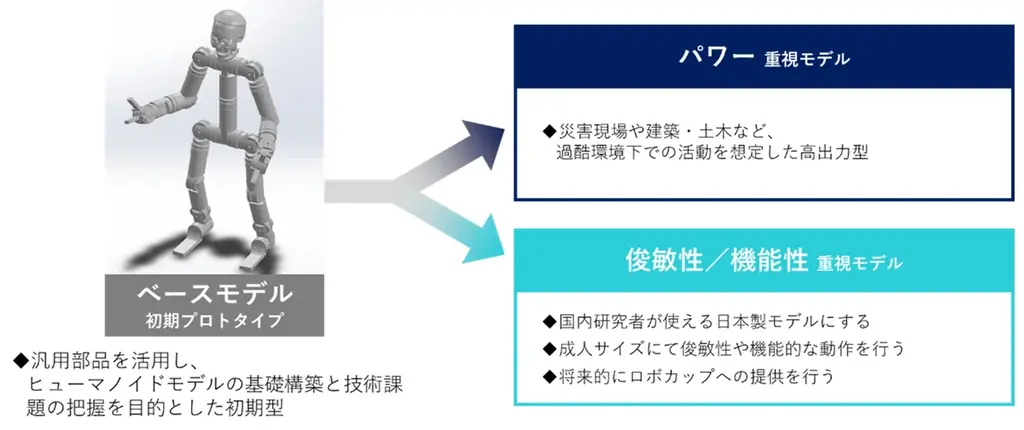
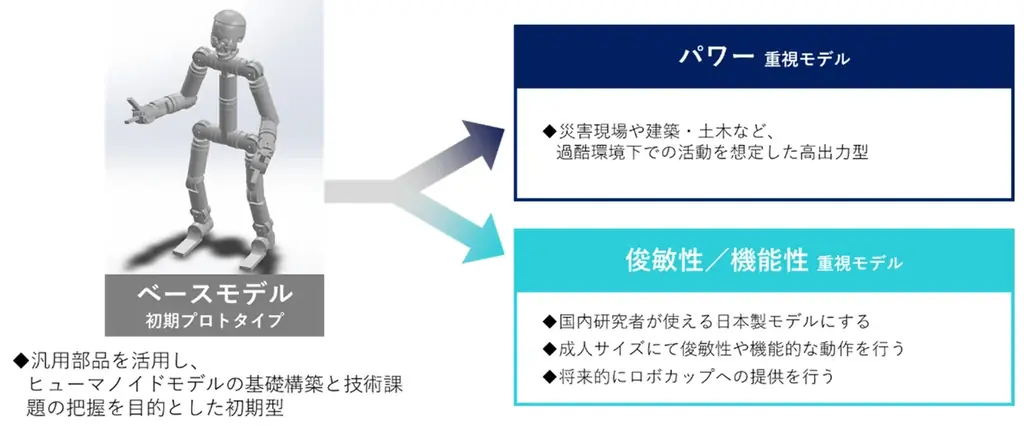
KyoHAが掲げる開発方針は「実用性」と「国産ハードウェアの確立」です。最初に汎用部品を活用した初期プロトタイプを製作して技術課題を洗い出し、その後に2系列の2ndモデルを開発する段取りを採用します。2ndモデルは用途別に、パワー重視モデルと俊敏性/機能性重視モデルに分けられます。
初期プロトタイプは汎用部品を用いることで開発のスピードを確保し、関係各社が共通で確認すべき技術課題(駆動系、シール・精密部品、電動機、制御ソフト、運動制御アルゴリズムなど)を抽出します。課題抽出後、各企業による専用部品や最適化により2ndモデルの開発へ移行します。
1st Step:初期プロトタイプの狙い
初期プロトタイプは「基礎構築と技術課題の把握」を目的とします。汎用部品を活用することで試作回数を増やし、課題を早期に洗い出します。ここで得られるデータは、制御アルゴリズムの調整、関節負荷評価、電力消費の実測など多岐にわたります。
初期段階では以下の点に重点を置きます。
- 汎用部品を用いたスピード試作
- 運動性能・耐久試験による課題抽出
- 制御ソフトとハードのインタフェース確認
2nd Step:用途別の2モデル
2nd Stepでは、用途に応じた2系統を開発します。まずは高出力・耐環境性を重視するパワー重視モデル、次に研究用途や高度な運動性能を求める俊敏性/機能性重視モデルです。
パワー重視モデルは災害対応や建築・土木現場などの過酷環境での活動を想定し、耐久性・高出力を重視します。俊敏性/機能性重視モデルは国内研究者向けに使いやすい日本製モデルを目指し、成人サイズで俊敏な動作や高機能な操作を行える設計で、将来的にはロボカップ等への提供も視野に入れています。
| モデル | 重点項目 | 想定用途 |
|---|---|---|
| 初期プロトタイプ | 汎用部品での基礎検証、課題抽出 | 性能検証、設計最適化 |
| パワー重視モデル | 高出力、耐環境性、耐久性 | 災害対応、建築・土木現場 |
| 俊敏性/機能性重視モデル | 機動性、機能性、研究利用性 | 研究機関向け、ロボカップ提供 |
開発スケジュール、理事紹介と問い合わせ先
KyoHAは2025年8月に設立され、今後の主要なマイルストーンとして2025年末の仕様確定、2026年3月の初期プロトタイプ製作、2026年末の2ndプロトタイプ製作を予定しています。これらのスケジュールは発表時点での計画であり、プロトタイプの評価結果に応じた調整が行われます。
本章ではスケジュールの詳細、理事および主要メンバーの紹介、問い合わせ先を整理します。
今後のスケジュール(主要マイルストーン)
発表された主要スケジュールは以下の通りです。工程と期日が明文化されているため、関係者や研究者は計画の前提を確認できます。
- 2025年末:製作するロボットのスペック確定
- 2026年3月:初期プロトタイプ製作予定
- 2026年末:2ndプロトタイプ製作予定
理事・主要メンバーの略歴(要旨)
理事長をはじめ、各分野の責任者は学術面・産業面で豊富な経験を有しています。ここでは公開された代表者の役職と経歴要点を示します。
- 高西 淳夫(早稲田大学)
- 早稲田大学創造理工学部総合機械工学科 教授。ヒューマノイド研究所所長。IEEEフェロー、日本ロボット学会フェロー等。2足歩行ヒューマノイドの研究開発に長年従事。
- 橋本 健二(早稲田大学)
- 大学院情報生産システム研究科 教授。人間搭乗型2足ロボットや運動制御、協調制御の研究を推進。
- 髙本 陽一(株式会社テムザック)
- 代表取締役議長。1993年よりロボット開発に関与し、ワークロイドのコンセプトで産業実装を目指す。
- 川久保 勇次(株式会社テムザック)
- 代表取締役社長。企業内外での実務経験を経て現職。製品の事業化を牽引。
- 川島 誠(株式会社村田製作所)
- 執行役員。電子デバイス事業と新規事業推進の経験を有する。
- 佐々木 啓文(SREホールディングス株式会社)
- コンサルティング&テクノロジーソリューション事業本部。AI・Robotics領域での事業立ち上げ支援を担当。
- 北野 宏明(OIST)
- 教授(アジャンクト)。RoboCup創設者の一人であり、自律型ロボット研究の発展に貢献。
- 中村 剛(マブチモーター株式会社)
- 取締役常務執行役員。小型モータ事業のグローバル経験を有する。
- 伊藤 隆(カヤバ株式会社)
- 技術本部 基盤技術研究所 所長。振動制御・油圧技術の専門家。
- 庄島 大八(NOK株式会社)
- NOK Sealing Solution CTO。界面制御技術とR&Dの実務経験を持つ。
- 尾崎 文彦(ヒーハイスト株式会社)
- 専務取締役。直動機器・精密部品加工に関する長年の実績を有する。
問い合わせ先と関連情報
本件に関する問い合わせは下記の窓口が案内されています。広報窓口のメールアドレスが公開されており、取材・技術的問い合わせに対応可能です。
- SREホールディングス株式会社 企画管理部門 広報IR室
Email:sre-ir-all@sre-group.co.jp - 株式会社テムザック 企画本部 広報
Email:tmsuk-pr@tmsuk.co.jp
関連リンク:マブチモーター社のニュースリリースページに当該発表の原文が掲載されています。URL:https://www.mabuchi-motor.co.jp/news/2025_1002.html
今回の発表の要点整理と本文で触れた主要項目の一覧
ここまでに示したすべての情報を整理し、主要な事実を一目で確認できるよう表にまとめます。設立の目的、参画組織、開発段階、スケジュール、連絡先など、報道発表に含まれる全項目を網羅しています。
以下の表は、発表内容の要点を整理したものであり、関係者や読者が計画の全体像を把握するために役立つよう配列しています。
| 項目 | 内容 |
|---|---|
| リリース日時 | 2025年10月2日 12時03分 |
| 団体名 | 一般社団法人 KyoHA(京都ヒューマノイドアソシエーション) |
| 設立完了 | 2025年8月(一般社団法人として) |
| 参画組織(主要) | 早稲田大学、株式会社テムザック、株式会社村田製作所、SREホールディングス、沖縄科学技術大学院大学、マブチモーター、カヤバ、NOK、ヒーハイスト |
| 開発方針 | 初期は汎用部品によるプロトタイプで課題抽出→2系統(パワー重視、俊敏性/機能性重視)でプロダクト化 |
| 主な用途想定 | 災害対応、建築・土木、研究用途、ロボカップ提供の可能性など |
| 主要スケジュール | 2025年末:スペック確定、2026年3月:初期プロトタイプ製作予定、2026年末:2ndプロトタイプ製作予定 |
| 理事長 | 高西 淳夫(早稲田大学 創造理工学部 教授) |
| 問合せ先(広報) | SREホールディングス(sre-ir-all@sre-group.co.jp)、株式会社テムザック(tmsuk-pr@tmsuk.co.jp) |
| 関連リンク | https://www.mabuchi-motor.co.jp/news/2025_1002.html |
本稿では、KyoHAの設立背景、参画組織とそれぞれの役割、製作を予定するロボットの段階的計画、主要スケジュールおよび理事・問い合わせ先を含む発表内容をすべて網羅して整理しました。今後のプロトタイプ評価や各社の具体的な技術投入の進捗が公開されることで、国内ヒューマノイド産業の具体的なロードマップがより明確になると考えられます。