CalTa M42改良で6.3kgに。スマホで点群確認可能
ベストカレンダー編集部
2025年10月14日 16:26
CalTa M42改良版提供開始
開催日:10月14日
📅 カレンダーに追加:Google|iPhone/Outlook

CalTa M42の改良で“手軽さ”と“鮮明さ”を両立した計測体験へ
CalTa株式会社、株式会社マップフォー、株式会社Liberawareの三社は、歩行計測で広域点群データを取得するソリューション「CalTa M42」について、大幅な性能改良を実施し、2025年10月14日から提供を開始しました。本改良はデバイスの物理的軽量化とユーザビリティの向上、そしてデータ処理アルゴリズムの改善を中心に行われています。
今回のアップデートにより、専門知識や高機能PCが不要となる運用の継続を維持しつつ、現場での直感的な計測と高品質な点群生成を同時に実現することが目指されています。点群データはTRANCITYの地図基盤上に写真と重ねて表示可能で、ノイズ自動除去機能により人や車の影響を軽減した高精細なデータが得られます。
- 専門知識や高機能PCは不要
- 歩行計測後にデータをアップロードするだけの簡便な運用
- ノイズ自動除去により高精細な点群生成
- 点群と写真のTRANCITY地図基盤への重ね合わせ表示
提供開始日と背景
本アップデートは公式に2025年10月14日 10時00分から提供が開始されました。CalTaは現地映像取得サービスやTRANCITYなどのサービスを手掛け、より低コストかつ簡便に高品質な広域点群データを提供することを目的としています。
技術面では、デバイス軽量化と計測中の可視化、アルゴリズム改善の三軸でユーザビリティとデータ品質の向上を図ることで、計測作業の効率化と利用拡大を狙っています。詳細な公式プレスリリースは以下で公開されています:
https://prtimes.jp/main/html/rd/p/000000014.000062080.html

物理デバイスとワークフローの具体的変化
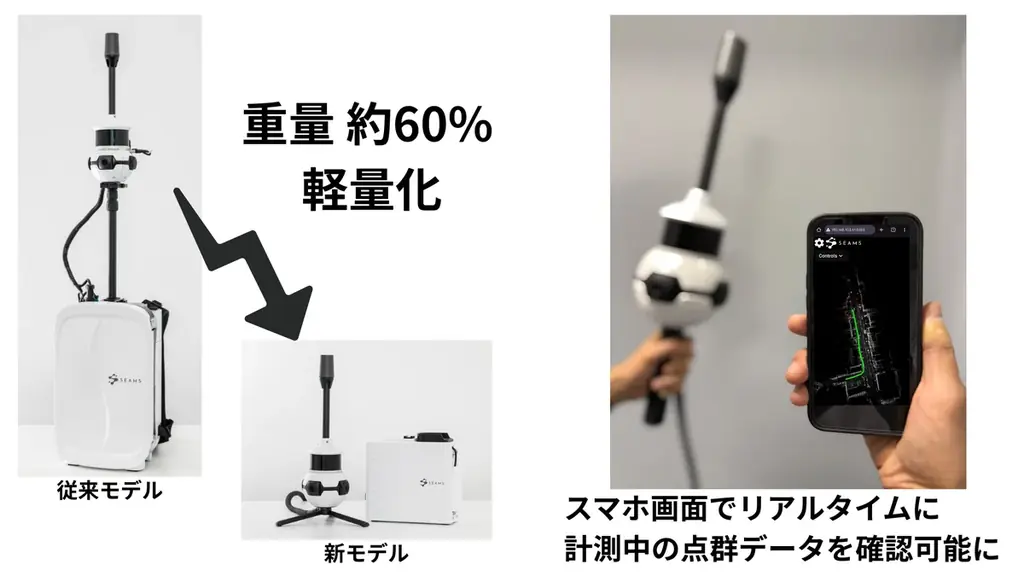
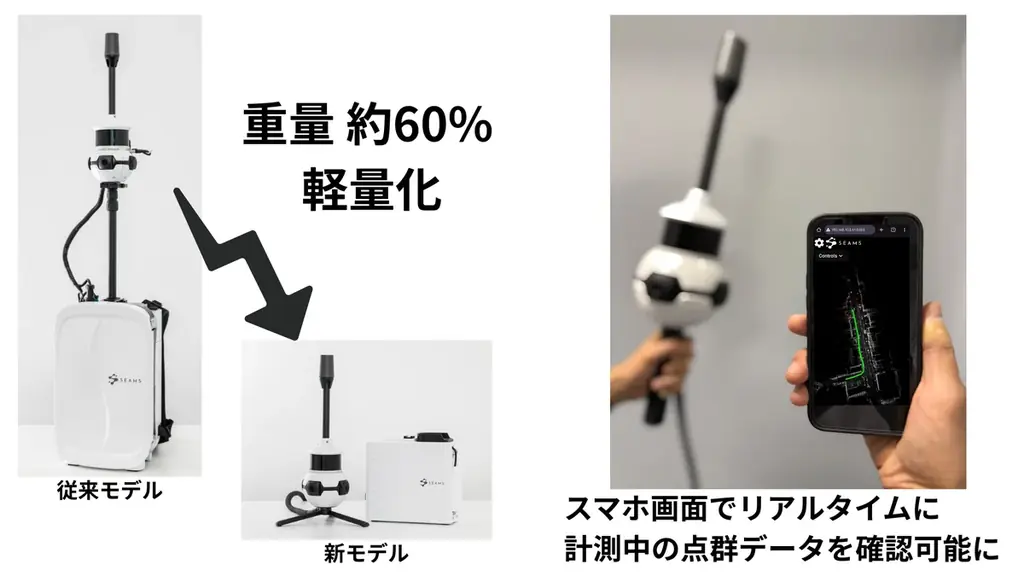
ハードウェア面では、三次元データ計測システム「SEAMS ME」の重量が約60%軽量化され、従来の15.5kgから新モデルは6.3kgになりました。軽量化は現場での取り扱い負担を大きく軽減し、長時間の歩行計測や狭隘な場所での運用を容易にします。
加えて、従来はPCへデータ転送後に確認していた点群データを、スマートフォン画面で計測中にリアルタイムで確認できるようになりました。これにより計測の途中で問題を検知しやすく、再計測や位置修正の手間が減少します。
| 項目 | 従来 | 今回の改良後 |
|---|---|---|
| SEAMS ME重量 | 15.5 Kg | 6.3 Kg(約60%軽量化) |
| 点群確認のタイミング | PC転送後に確認 | 計測中にスマートフォンでリアルタイム確認 |
| データ処理 | 既存アルゴリズム | 改良済みアルゴリズムで高品質化 |
計測ワークフローの流れ
具体的な運用の流れはシンプルです。歩行計測を行い、計測後にデータをアップロードするだけで高精度な広域点群データが得られます。計測中にスマートフォンでの確認が可能になったことにより、現場判断による再計測の回避や計測品質の確保が容易になりました。
ワークフローは以下の通りです。
- SEAMS MEを携行して歩行計測を実施
- 計測中にスマートフォンで点群をリアルタイム確認
- 計測後、データをアップロード
- サーバー側でノイズ除去や位置推定を含むデータ処理を実施
- TRANCITY地図基盤上に点群と写真を重ねて表示
アルゴリズム改良と位置推定の向上
ソフトウェア面では点群データ処理アルゴリズムの改善により、点群の高品質化を実現しました。人や車といった移動対象のノイズを自動で除去する処理は従来より精度が向上し、結果として切れ目のない、より鮮明な点群データが得られます。
また、狭い道や階段などの環境では従来は位置修正が必要な場合がありましたが、新たに開発した位置推定手法を導入することで、点群データを地図基盤上により高精度で配置可能になっています。これにより現地で得た測位情報と地図基盤との整合性が向上します。
- ノイズ除去
- 人や車などの動的オブジェクトを自動で識別・除去し、静的環境の構造を正確に抽出します。
- 高品質点群生成
- センサデータに対する最適化処理により、解像感の高い点群が得られます。写真との組合せ表示により視覚的な確認が容易です。
- 位置推定手法
- 狭い場所や階段など複雑環境でも位置のずれを抑え、地図基盤上への配置精度を高める新しい推定アルゴリズムを採用しています。
その他の機能向上
カメラ周りやPCへのデータ転送、通信方法などの各種機能についても改善が行われています。これらの改善は現場での作業効率を高めるためのもので、全体として計測からデータ利用までの流れが滑らかになっています。
提供開始は2025年10月14日であり、この日付以降に改良版の各機能が利用可能です。
関係各社の役割と会社概要
今回の改良はCalTa、マップフォー、Liberawareの三社による連携で実施されました。それぞれが持つ技術領域やサービスが組み合わさることで、装置のハードウェア改良からアルゴリズムの実装、現地取得や映像加工まで一貫した提供体制が整えられています。
以下に三社の概要を整理します。各社のURLや事業内容、所在地、代表者、設立日などを明記します。
| 企業 | 所在地 | 代表者 | 設立 | 主な事業・URL |
|---|---|---|---|---|
| CalTa株式会社 | 東京都港区高輪二丁目18番10号 高輪泉岳寺駅前ビル9階 | 代表取締役CEO 高津 徹 | 2021年7月1日 | TRANCITY、CalTa M42、現地映像取得サービス、受託開発 https://calta.co.jp/ |
| 株式会社マップフォー | 愛知県名古屋市中区錦二丁目8番1号 | 代表取締役 田中 一喜 | 2016年9月1日 | 高精度3次元地図データ作成システム・ソフトの提供、物体認識、位置推定、SEAMS ME関連情報 https://www.map4.jp SEAMS ME 新モデルの詳細: https://www.map4.jp/media/news/202506102056/ |
| 株式会社Liberaware | 千葉県千葉市中央区中央3-3-1 | 代表取締役 閔 弘圭 | 2016年8月22日 | 産業用ロボット・ドローンの研究開発、IoT・AIを用いたシステム開発、映像加工・編集サービス https://liberaware.co.jp/ |
マップフォーはSEAMS MEの機構・測位技術およびMAP IV Engineなどの製品開発を担い、Liberawareはロボティクスや映像加工に関する技術で連携しています。CalTaはTRANCITYやサービスの統括と提供を行い、三社が補完関係にあります。
要点の整理
以下の表で、本記事で取り上げた主要な点を整理します。発表日、提供開始日、主要な改良点、関係企業、関連URLなどをまとめました。
| 項目 | 内容 |
|---|---|
| 発表日 | 2025年10月14日 10時00分(CalTa株式会社発表) |
| 提供開始日 | 2025年10月14日 |
| 製品名 | CalTa M42(撮影デバイス:三次元データ計測システム SEAMS ME) |
| 主な改良点 | SEAMS MEの軽量化(15.5Kg→6.3Kg)、スマートフォンでの計測中リアルタイム点群確認、点群処理アルゴリズム改善、位置推定手法の強化、カメラ・データ転送・通信方法の改善 |
| データ運用の特徴 | 歩行計測後のデータアップロードのみで利用可能、ノイズ自動除去、TRANCITY地図基盤への写真重ね表示 |
| 関係企業 | CalTa株式会社、株式会社マップフォー、株式会社Liberaware |
| 主要URL | CalTa: https://calta.co.jp/ 、プレスリリース: https://prtimes.jp/main/html/rd/p/000000014.000062080.html、マップフォー: https://www.map4.jp 、SEAMS ME詳細: https://www.map4.jp/media/news/202506102056/、MAP IV Engine: https://www.map4.jp/products/map4-engine/、Liberaware: https://liberaware.co.jp/ |
以上が本アップデートの要点と各社の役割、技術的な改善点の整理です。本件は現地での点群取得の効率化とデータ品質の向上を両立させる取り組みであり、2025年10月14日から改良版の提供が開始されています。